|
Dezibot 4
|
|
Dezibot 4
|
This component controls the IMU (Accelerometer & Gyroscope) ICM-42670-P. More...
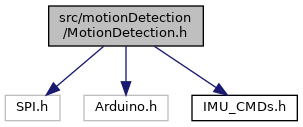
 Include dependency graph for MotionDetection.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for MotionDetection.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Classes | |
| struct | IMUResult |
| struct | Orientation |
| struct | FIFO_Package |
| class | MotionDetection |
Enumerations | |
| enum | Axis { xAxis = 0x01 , yAxis = 0x02 , zAxis = 0x04 } |
| enum | Direction { Front , Left , Right , Back , Neutral , Flipped , Error } |
This component controls the IMU (Accelerometer & Gyroscope) ICM-42670-P.
Definition in file MotionDetection.h.
| enum Axis |
| Enumerator | |
|---|---|
| xAxis | |
| yAxis | |
| zAxis | |
Definition at line 23 of file MotionDetection.h.
| enum Direction |
| Enumerator | |
|---|---|
| Front | |
| Left | |
| Right | |
| Back | |
| Neutral | |
| Flipped | |
| Error | |
Definition at line 34 of file MotionDetection.h.